Navigation and positioning errors caused by natural conditions on Mars
26. Január, 2015, Autor článku: Kozár Jozef, Informačné technológie
Ročník 8, číslo 1  Pridať príspevok
Pridať príspevok
![]() Evolution in robotic exploration of Mars is bringing more complex questions into our attention. One of the most important is becoming the precise positioning and navigation services. It is simply because of the successful completion of some of the present steps in scientific exploration of Mars. We know more and more every year and future missions will have more difficult targets. These missions will go under the ground of the Martian soil and will look for another signs of possible life. These missions will include missions, which will travel more on the surface, missions which will possibly fly in the Martian sky and also possible human mission to Mars in the first half of the 21st century. The aim of this paper is to describe some of the most important positioning and navigation errors, which can be caused by the environment and planetary conditions of Mars.
Evolution in robotic exploration of Mars is bringing more complex questions into our attention. One of the most important is becoming the precise positioning and navigation services. It is simply because of the successful completion of some of the present steps in scientific exploration of Mars. We know more and more every year and future missions will have more difficult targets. These missions will go under the ground of the Martian soil and will look for another signs of possible life. These missions will include missions, which will travel more on the surface, missions which will possibly fly in the Martian sky and also possible human mission to Mars in the first half of the 21st century. The aim of this paper is to describe some of the most important positioning and navigation errors, which can be caused by the environment and planetary conditions of Mars.
1. Mars as terrestrial planet
Natural conditions of every planet are different in every case. A terrestrial planet or rocky planet is a planet that is composed primarily of silicate rocks or metals. Within the Solar System, the terrestrial planets are the inner planets closest to the Sun. Terrestrial planets have a solid planetary surface, making them substantially different from the usually larger gas giants, which are composed mostly of some combination of hydrogen, helium, and water existing in various physical states. [1]
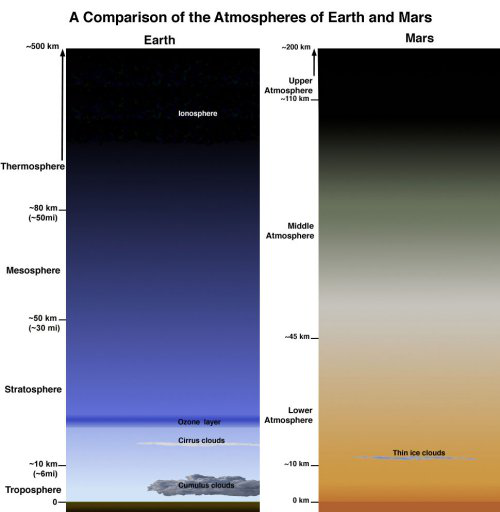
Figure 1: Comparison of Martian atmosphere to atmosphere of Earth. Image credit: NASA, JPL-Caltech
Mars is terrestrial planet of the inner Solar System, which in many cases means that it is very similar to the Earth. Although there are some differences which in some particular cases have strong impact on used research technology in this environment. Mars has similar surface conditions to Earth, but the atmosphere, mesosphere and ionosphere layers are different. Air mass around the planet, which forms its atmosphere, has different chemical composition, different pressure and also different thickness when compared to Earth. Mars has only very thin atmosphere, which contains mostly carbon dioxide (CO2).
The surface pressure on planet is only 0,7% of average surface pressure at the sea level on Earth. The pressure on Mars is being changed according to seasonal changes. In winter the carbon dioxide freezes and then it is snowing and also it creates the polar caps. This process radically changes the composition of state of atmosphere – the carbon dioxide is disappearing. In summer the polar caps disappear or are getting smaller and the carbon dioxide is getting back into the atmosphere. [2] All these facts have partial influence on possible use of navigation or positioning systems there. Together these natural conditions form some kind of unique environment which must be considered in every aspect of technology research of Mars.
2. Coordinate system on Mars
Mars is one of the planets of the Solar System, which is under very deep scientific research process of more institutions. Scientific research was using various coordinate systems for Mars, based on different specifications. But it was in early stages of the Mars exploration. Later it started to cause small misunderstandings in positioning and locating of artificial objects on its surface (probes). This is the reason why at present we use one unified coordinate system similar to the one we have on Earth. The zero meridian on Mars, or the Martian “prime meridian” has been agreed to be the Airy-0 crater in Sinus Meridiani region.
This crater is about 0.5 kilometres across and lies within the larger crater Airy. This crater was chosen by Merton Davies as the Mars’s prime meridian in 1969 based on Mariner 6 and 7 photographs. [3] Another important value in coordinate system and defining the location is the elevation. The zero elevation on Earth is based on sea level. Since Mars has no oceans and hence no ‘sea level’, it was convenient to define an arbitrary zero-elevation level for mapping the surface. This value for Mars is arbitrarily defined in terms of a constant atmospheric pressure. From the Mariner 9 mission up until 2001, this was chosen as 610.5 Pa (6.105 mbar), on the basis that below this pressure liquid water can never be stable (the triple point of water is at this pressure). This value is only 0.6% of the pressure at sea level on Earth.
Note that the choice of this value does not mean that liquid water does exist below this elevation, just that it could were the temperature to exceed 273.16 K (0 degrees C, 32 degrees F). [4] In 2001, Mars Orbiter Laser Altimeter data led to a new convention of zero elevation defined as the equipotential surface (gravitational plus rotational) whose average value at the equator is equal to the mean radius of the planet. [5] These agreed constants are necessary for creating of unified maps of terrain of whole surface (globe) in both electronic or paper versions. Electronic versions are then modified for computer use and processed by on-board navigation systems of every probe or rover on Mars. From global electronic maps are derived precise maps of every region or area which is target of each specific research.
3. Current and proposed Martian positioning and navigation systems
At present, there are various possible positioning systems suitable for Martian conditions. These systems usually differ in the technology which they use as method for calculating of precise position and coordinates on the surface. Typical system for positioning used by probe on another planet is the inertial positioning system. This system calculates the exact position of the probe (rover) using the input values – velocity, orientation (calculated azimuth in degrees) and time (duration needed to drive the specific range with known velocity). The necessary parts of such systems are accelerometers (motion sensors), rotation sensors (gyroscopes) on-board computer. Not very precise location calculated by such system can be sometimes small disadvantage when this system is used for precise positioning in small areas in small velocities of even smaller rover (probe) on Mars.
Another, more important systems used for orientation of rover in some specific areas of Mars are intelligent navigation systems. These systems are currently used for example by rover Curiosity (Mars Science Laboratory). Intelligent navigation systems are autonomous systems based on machine learning and computer data processing. Whole system is based on navigation cameras and sensors, computer and software. Rover simply learns its surroundings by “watching” with navigation cameras, navigation computer is processing these learned data and by using other sources (known velocity, time and distance) calculates its position in the specific area of interest. These systems are very autonomous, but cannot be used by other probes and also these systems very depend on overall health of whole rover. It simply means that if something general will go wrong in the whole system of rover, then this system simply becomes useless. It even cannot be used by another probe or possible human crew somewhere on surface of Mars.
As a result of disadvantages mentioned above can be well known technology – GNSS (global navigation satellite system) applied on conditions of the red planet. These systems can serve to multiple users (robotic or human) in real time. They can provide accurate positioning and navigation services, can provide immediate fix of position when needed and also can be used as relay system when retransmission of any data back to Earth (or from Earth to Mars) is needed. And as the last simple service which these systems can offer, is the provisioning of precise universal time service on Mars. Scientific research of the concept of such satellite navigation system for Mars is currently in progress in Faculty of Aeronautics of Technical University of Kosice (Slovakia, EU). The proposed name of this system is FATIMA (acronym: Fix And TIme provisioning system for MArs). [6]
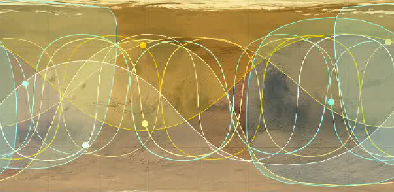
Figure 2: Simulation of ground tracks of GNSS for Mars (FATIMA). Concept resulted from research in LF TUKE (http://lab.sciencemars.com). Image Credit: Jozef Kozar
4. Positioning precision factors on Mars
Any system used in Martian environment will be influenced by natural conditions of this planet. It does not matter if it will be simple inertial navigation system, intelligent orientation system or global navigation satellite system. However the first two systems can be influenced by atmospheric and surface conditions on Mars, the third one will be influenced by global planetary conditions. When focusing on use of the first two mentioned systems, we have to consider factors like dust storms, weather and climate changes, possible physical changes on the surface caused by wind, water or ice and some others. Some minor influence on navigation and positioning will have the radiation, temperatures and surface pressure – these can have some effect on electronic systems generally, but not huge influence on determination of the position or on further navigation.
As mentioned above, these systems cannot be considered as systems for multiple using by more users/robots at the same time and in real time. Real time, multipurpose systems like GNSS are influenced by other factors, especially by global planetary conditions, although their precise positioning and navigation service and multipurpose use is showing us more advantages. Important factors influencing service of possible global navigation satellite system (GNSS) on Mars are not too many. Most discussed one is the ionosphere of Mars and the missing magnetic field. Ionosphere on Mars is different on day side than on night side of the planet, so the amount of ionized particles may have impact on amount of resulted range errors in calculation of location by such system. The artist’s concept of amount of ionized particles and of thickness of the ionosphere on Mars can be seen on image below.
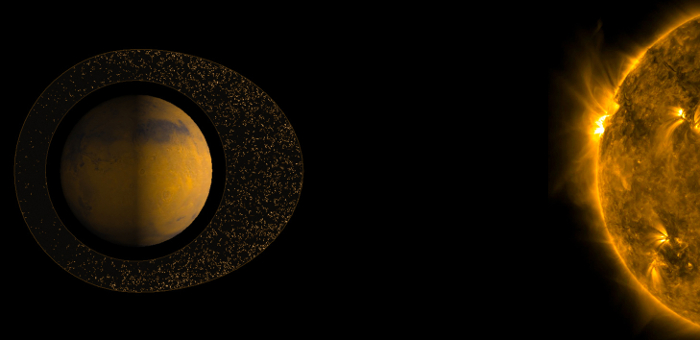
Figure 3: Dayside and night side ionosphere of Mars. Image Credit: ESA
For precise calculation of the position on surface we need a direct visibility of at least three satellites. This positioning and calculation is based on the distance measuring technology. We must consider the signal crossing the ionosphere layer between the satellite and user/robot on surface. The ionosphere will cause refraction of this signal, which simply means, that it may cause losses of some signals, minor changes of signals or its modification. All these conditions will result in range errors calculated on surface. The range errors depend on the total electron content (TEC) currently present in the path of the transmitting signal. We can calculate these errors according the observed TEC values on different orbits at different altitudes. The best way to avoid most of the errors is to implement the most suitable frequency when designing this kind of systems and also to use the most suitable altitude of the orbits around Mars.
5. Positioning and navigation errors
Positioning error is the difference in real location and the calculated location by the navigation system. Navigation error is a difference between the real location of the destination of the route and the destination reached by the probe/rover using the navigation system. In both cases we can name these errors simply as “range errors”. It is desired to avoid the most of the range errors, especially when roving the unknown area. We cannot control the Martian rover from Earth, in a real time. The reason is that the signal travels approximately 20 minutes from Earth to Mars and vice versa.
It means, that when we will send a control command to rover from the control room on Earth, the rover will receive this signal after 20 minutes. Rover will run the command, perform the activity asked from control centre and then it will send a confirming signal back to Earth. This way will the signal travel more than 20 minutes (on average). It means, that for example when rover will reach some dangerous point (valley, canyon, crater, etc), it will not have a sufficient amount of time to avoid such obstacle and rover will crash. Crashing rover/probe will mean the loss of rover and end of the extremely expensive scientific space mission. So avoiding any positioning and range errors is a must. No exceptions.
6. Conclusion
Positioning and navigation are becoming one of the most critical parts of the current and future missions in exploration of planet Mars. It is easy to understand. We have sent already many probes and rovers to explore this planet. Mars is the next step in our development and it is a challenge for the mankind to send a man to land there. This mission will be critical from any point of view, because it will be the farthest destination visited by humans ever. Precision will mean protection of lives, saving time and providing an emergency system, which will be able to alert the mission control about any possible issue in false navigation or guidance of the on-board systems on Mars. The same means not only for the planned future human missions, but also for the robotic exploration missions.
Bibliography
- The IAU’s Proposed Planet Definition. Space.com. [online]. 19.1.2015 [cit. 2015-01-19]. Dostupné z:
http://www.space.com/2743-iau-proposed-planet-definition.html - Atmosphere of Mars. SCIENCE MARS Journal. [online]. 19.1.2015 [cit. 2015-01-19]. Dostupné z:
http://www.sciencemars.com/planet-mars/atmosphere/ - Morton, Oliver (2002). Mapping Mars: Science, Imagination, and the Birth of a World. New York: Picador USA. pp. 22–23. ISBN 0-312-24551-3.
- Carr, M.H., 2006, The Surface of Mars, Cambridge, 307 p.
- Smith, D.; Zuber, M.; Frey, H.; Garvin, J.; Head, J. et al. (25 October 2001). “Mars Orbiter Laser Altimeter: Experiment summary after the first year of global mapping of Mars”. Journal of Geophysical Research: Planets 106 (E10): 23689–23722. doi:10.1029/2000JE001364
- Kozár, J.. Research of the theoretical concept of small satellite navigation system for planet Mars. Mars Systems Web Laboratory. [online]. 19.1.2015 [cit. 2015-01-19]. Dostupné z:
http://lab.sciencemars.com/

