Optický korelátor v inventarizačnom systém pre evidenciu zvislých dopravných značiek
07. September, 2015, Autor článku: Solus David, Informačné technológie
Ročník 8, číslo 9  Pridať príspevok
Pridať príspevok
![]() Cieľom tohto príspevku je navrhnúť systém, ktorý umožňuje prostredníctvom svojej inventarizácie poskytnúť potrebné informácie o kvalite použitej dopravnej značky v cestnej premávke. Celkový inventarizačný systém obsahuje jednotlivé funkčné bloky, ktoré sú podrobne vypracované. Súčasťou je aj databáza dopravných značiek, na základe ktorej sa vykonáva revízia konkrétnej značky nachádzajúcej sa na určitej pozícii. Databáza poskytuje potrebné údaje, ktoré sú nevyhnutné pre komplexné vyhodnotenie porovnávaných dopravných značiek. Porovnávané značky sú nasnímané kamerou a upravené softvérovými prostriedkami podľa potreby. Na komparáciu v experimentálnej časti je použitý prístroj, ktorý využíva najrýchlejšie prenosové médium (svetlo) nazývaný Cambridge korelátor.
Cieľom tohto príspevku je navrhnúť systém, ktorý umožňuje prostredníctvom svojej inventarizácie poskytnúť potrebné informácie o kvalite použitej dopravnej značky v cestnej premávke. Celkový inventarizačný systém obsahuje jednotlivé funkčné bloky, ktoré sú podrobne vypracované. Súčasťou je aj databáza dopravných značiek, na základe ktorej sa vykonáva revízia konkrétnej značky nachádzajúcej sa na určitej pozícii. Databáza poskytuje potrebné údaje, ktoré sú nevyhnutné pre komplexné vyhodnotenie porovnávaných dopravných značiek. Porovnávané značky sú nasnímané kamerou a upravené softvérovými prostriedkami podľa potreby. Na komparáciu v experimentálnej časti je použitý prístroj, ktorý využíva najrýchlejšie prenosové médium (svetlo) nazývaný Cambridge korelátor.
Úvod
Jedným z dôležitých predpokladov a faktorov sociálneho a ekonomického rozvoja štátov a ich regiónov je cestná infraštruktúra. Osobitne to platí v Slovenskej republike, keďže cestná doprava je tu najrozšírenejšou zložkou dopravy. Súčasťou každej cestnej infraštruktúry je inštalácia a následná revízia dopravného značenia ciest [1, 4]. Dopravné značky slúžia teda na vizuálne usmerňovanie vozidiel a ostatných účastníkov premávky na pozemných komunikáciách. Ich správna inštalácia a udržiavanie ich funkčných parametrov v súlade s technickými špecifikáciami má vplyv na zvýšenie plynulosti a bezpečnosti premávky. Pre zachovanie účelnosti dopravného značenia je nutné navrhnúť systémy, s ktorými bude ich kontrola efektívnejšia a hlavne v reálnom čase. Preto aj táto práca je zameraná na vytvorenie takéhoto inventarizačného systému [2,3].
V druhej kapitole sa nachádza popis hardwarovej schémy inventarizačného systému spolu s popisom jednotlivých komponentov. Tretia kapitola obsahuje popis grafického používateľského prostredia inventarizačného systému, ktorý je vytvorený pomocou programovacieho jazyka C#. Posledná kapitola je venovaná experimentálnemu overeniu funkčnosti inventarizačného systému na rozpoznávanie dopravných značiek pomocou optického korelátora. Experiment je vykonaný na vyhradenom cestnom úseku, z ktorého sa získajú skúmané videá. Najprv sa vytvorí databáza tohto úseku a následne sa počas určitého časového obdobia získajú videá, na základe ktorých sa porovnáva funkčnosť značiek [3-7].
1. Hardwarová schéma inventarizačného systému
Štruktúra hardvérovej schémy zobrazenej na Obr. 1 pozostáva z dopravnej scény, ktorá je nasnímaná z digitálnej kamery. Kamera bola pripevnená na čelnom skle automobilu. Kamera počas doby snímania je pripevnená k počítačovej jednotke, podobne ako GPS modul. Následne sa videá spracúvajú v počítačovom zariadení pomocou softvérového programu. Upravená snímka sa spolu s referenčnou snímkou z databázy poslali do optického korelátora, ktorý vykonal koreláciu snímok a výslednú hodnotu poslal späť do počítača, kde sa potom zobrazili údaje na displej s konečným výsledkom o dopravnej značke [3-7].
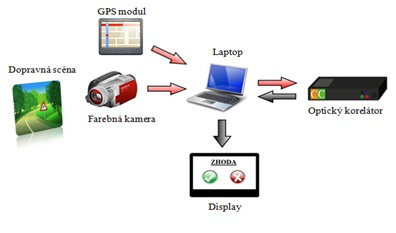
Obr. 1 Hardwarová schéma inventarizačného systému
1.1. Video kamera
Získanie videí z cestnej premávky sa uskutočňuje prostredníctvom kamery, ktorej výber je mimoriadne dôležitý. Čím bude kamera obsahovať rozsiahlejšie funkcie a vlastnosti, tým môže dosiahnuť hodnotnejší obraz. Nastavenie kamery ponúka širokú škálu možností. Pri nastavení maximálnych parametrov môže dôjsť k iným negatívnym vplyvom. Potrebné je prispôsobiť parametre ako snímaciu frekvenciu a rozlíšenie, no pri zvýšení snímkovacej frekvencie a rozlíšenia digitálnej kamery je potrebné disponovať s dostatočným úložným priestorom.
1.2. Laptop a display
Počítačová jednotka je súčasťou hardvérovej schémy kvôli poskytnutiu softvérového prostredia pre efektívnu činnosť jednotlivých blokov. V prvej časti obsahuje programy, ktoré mu umožnia upraviť vstupné dopravné scény z videí získaných z dopravnej premávky. Pomocou predspracovaného softvéru môžeme odstrániť nepodstatné vzorky zo vstupných scén a udržať iba relevantné informácie pre rozpoznávanie dopravných značiek. Pričom do počítača je pripojený aj GPS modul, z ktorého prijíma informácie o polohe vozidla potrebné pri práci s databázou.
V druhej časti sa nachádza program Fourier Optics Experimenter, ktorý nám umožňuje komunikáciu s Cambridge korelátorom. Potom súčasne je do korelátora poslaná predspracovaná značka so značkou z databázy. Informácia o ich vzájomnom vzťahu vstupuje späť do riadiacej jednotky a výsledok porovnania je zobrazený na displeji, prípadne uložený v dokumente, ktorý obsahuje zoznam poškodených značiek. Na displeji sa zobrazí informácia o tom, či bola značka rozpoznaná, a teda či nedošlo k jej poškodeniu.
1.3. Optický korelátor
Optický korelátor (Optical Correlator) využíva modernú technológiu pre analýzu obrazov. Táto technológia je založená na procese rozpoznávania obrazov, kde automaticky rozpozná alebo identifikuje obsah obrazu tým, že kombinuje prichádzajúci obraz s referenčným obrazom. Dokáže porovnávať dva alebo viaceré obrazy, prípadne dvojrozmerné (2D) alebo trojrozmerné (3D) dátové údaje spracované vysokou rýchlosťou a v reálnom čase.
2. Užívateľské prostredie navrhnutého systému
Pre vývoj inventarizačného systému bolo zvolené vývojové prostredie Microsoft Visual Studio 2012. Pre prepojenie databázy s programom sme použili špeciálny balíček Microsoft SQL Server Compact. Pre lepšie pochopenie ako celkový program funguje, čo je potrebné prednastaviť a následne spracovať jednotlivé výstupy, kde budú analyzované jednotlivé funkčné bloky tohto programu.
2.1. Watching road
Na Obr. 2 je zobrazená úvodná zložka, v ktorej dochádza k spracovaniu videa a detekcii dopravných značiek pomocou GPS súradníc.
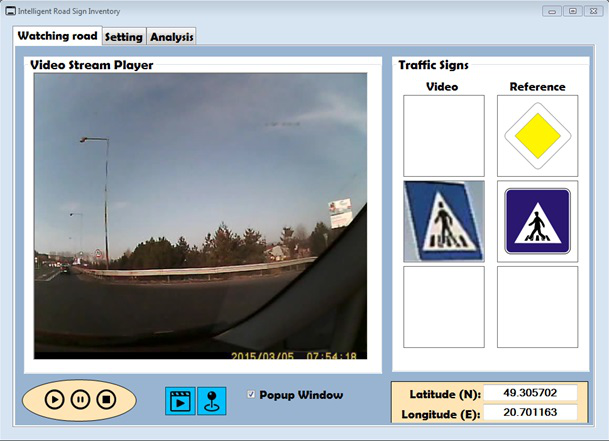
Obr. 2 Zložka – Watching road
Podblok Video Stream Player prehráva načítané videozáznamy zo zvoleného súboru pomocou špeciálneho tlačidla modrej farby a taktiež sa načítajú GPS súradnice z databázy, aby mohlo dôjsť k procesu predspracovania dopravnej scény. Na ovládanie videa slúžia tlačidlá zobrazené ikonami Play, Pause a Stop. Podblok Traffic Signs zobrazuje dopravné značky, ktoré boli detegované alebo značky, ktoré na danej GPS pozícii mali byť, ale program ich nedokázal identifikovať.
2.2. Setting
Na Obr. 3 je zobrazená druhá zložka, v ktorej dochádza k nastaveniu určitých parametrov a ciest. videa a detekcii dopravných značiek pomocou GPS súradníc. Jeho štruktúra pozostáva z troch podblokov a to Profiles, Paths a Database. Podbloky Profiles a Paths majú načítavací charakter, pričom podblok Database už len zobrazuje načítané údaje.
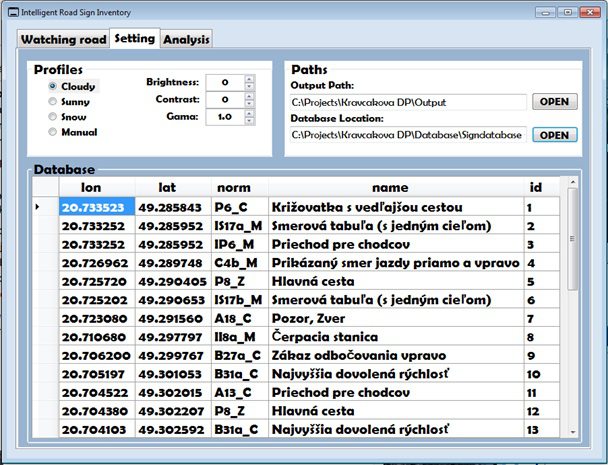
Obr. 3 Zložka – Setting
Podblok Profiles zahŕňa nastavenia pre rôzne svetelné podmienky, počas ktorých boli získavané videozáznamy a nastavenia, kde sa menia svetelné vlastnosti spracovaných obrazov. Videozáznamy boli snímané počas slnečného počasia (SUNNY), počasia ovplyvnené snehovými podmienkami (SNOW) a počasie s veľkou oblačnosťou (CLOUDY). Pre všetky tieto profily sú vopred prednastavené vlastnosti ako jas (Brightness), kontrast (Contrast) a gama korekcia (Gama). V prípade, že používateľ nechce použiť ani jeden z preddefinovaných profilov, má možnosť využiť manuálny profil (MANUAL), kde si tieto potrebné vlastnosti dokáže slobodne voliť podľa uváženia.
Podblok Paths obsahuje nastavenia, bez ktorých nebude možné načítať videozáznam spoločne s GPS súradnicami. V tejto časti sa determinuje cesta, z ktorej sa načítava databáza a cesta k zložke, pomocou nej sa budú ukladať spracované a detegované dopravné značky. Tie budú poskytovať informácie pre ďalšiu časť programu. Ako už bolo spomenuté podblok Database spĺňa zobrazovaciu funkciu, kde sa uložia údaje zo zvolenej databázy. Každá databáza obsahuje štyri údaje ako severnú zemepisnú dĺžku (Longitude), východnú zemepisnú šírku (Latitude), kategorizačné označenie (Norm), názov dopravnej značky (Name) a v neposlednom rade poradové číslo každej značky uloženej v databáze (ID).
2.3. Analysis
Posledný blok celého programu predstavuje analýza získaných dát (Obr. 4). Skladá sa z časti Data Definitions a Data Evolution. Data Definitions (Definovanie dát) je dôležitý element na definovanie potrebnej cesty, kde sa počas jednotlivých procesov ukladali dáta. Rozhodujúce je určenie cesty výskytu referenčných dopravných značiek a cesty výstupných dopravných značiek, ktoré využijeme pre vizuálne zhodnotenie.
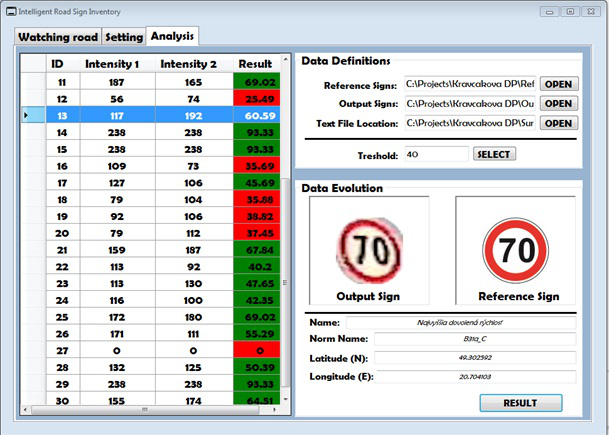
Obr. 4 Zložka – Analysis
Nachádza sa tam aj funkcia pre načítanie textového súboru. Tento súbor bol získaný ako výstup optického korelátora, pomocou ktorého sme robili porovnanie dvoch snímok. Celý textový súbor sa nám zobrazí v ľavej časti Obr. 4 v podobe tabuľky. Táto tabuľka obsahuje údaje poradového čísla experimentu (ID), intenzity referenčnej snímky (Intensity 1) a intenzity snímky získanej z videozáznamu (Intensity 2). Posledný stĺpec (Result) vypočíta percentuálnu hodnotu na základe oboch intenzít.
Políčko označené ako Treshold (hranica) umožňuje používateľovi zvoliť si hranicu pre rozlíšenie jednotlivých experimentov v tabuľke. Táto odlišnosť bude zvýraznená vizuálne, kde hodnoty nad zvolenou hranicou budú označené zelenou farbou a hodnoty pod červenou farbou. Týmto prechádzame do oblasti Data Evolution (Vyhodnotenie dát). Zobrazujú sa v nej údaje ako výstupná snímka (Output Sign), referenčná snímka (Reference Sign) a údaje získané z databázy podľa toho, o akú dopravnú značku ide. Toto prepojenie je závislé podľa poradových čísel v tabuľke a v databáze.
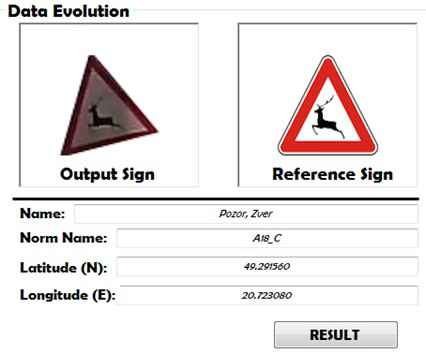
Obr. 5 Data Evolution – detegované dopravné značky
Pri zobrazovaní môžu nastať dve situácie. Prvá z nich je zobrazená na Obr. 5, kde vidíme, že dané značky boli detegované. To však neznamená, že ich hodnota je nad zvolenou prahovou úrovňou. Zobrazenie oboch značiek sa týka všetkých dopravných značiek aj nad, aj pod prahovou hodnotou.
Obr. 6 Príklady výstupu tlačidla Result
Špeciálne tlačidlo Result (Výsledok) má charakter potvrdenia, či pri zadanej hranici nastala zhoda pri snímke alebo nie (Obr. 6). Druhá situácia nastáva, keď sa zobrazí referenčná značka, no výstupná značka bude nahradená univerzálnou snímkou, ktorá predstavuje, že požadovaná snímka nebola v procese predspracovania detegovaná (Obr. 7). Preto sú jeho výstupné hodnoty intenzít zobrazené v tabuľke ako nulové.
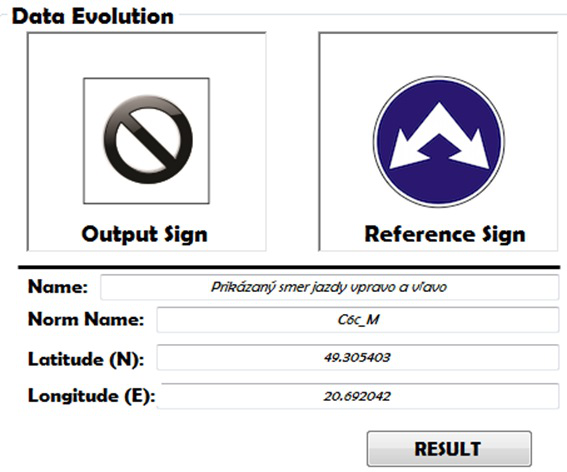
Obr. 7 Data Evolution – nedetegované dopravné značky
3. Experimenty
V experimentálnej časti sme spracovali tri odlišné videozáznamy. Každý z nich je špecifický podľa toho, v akých svetelných podmienkach bol snímaný. Konkrétne to bolo počas slnečného počasia, zamračeného počasia a posledné video bolo snímané v zimnom období. Počet zvislých dopravných značiek bol stále rovnaký, aby tak bolo možné analyzovať rozdiely pri porovnávaní. Individuálne boli spracované všetky videá a snímky z nich sa v ďalšom kroku spracovali optickým korelátorom. Výsledky sú premietnuté do štatistických hodnôt, z ktorých sú vytvorené grafy a tabuľky pre lepšie zhodnotenie [4-7].
3.1. Experiment #1
V tejto kapitole je detailne spracovaný videozáznam nasnímaný počas slnečného počasia (SUNNY). Ukážka, ako vyzerala dopravná scéna počas tohto dňa, je zobrazená na Obr. 8.

Obr. 8 Dopravná scéna – Sunny
Taktiež je na nej vidieť aj detegovanú dopravnú značku, ktorá po procese predspracovania bola spracovaná optickým korelátorom. Dopravná značka je v databáze na pozícii číslo 7. Štatistická hodnota ich vzájomnej miery podobnosti na základe intenzít oboch snímok je 66.08 %. Týmto môžeme špecifikovať, že dopravná značka bude patriť do hranice prahových úrovní 40%, 50% a 60%. Jedinú hranicu, ktorú nespĺňa, je prahová úroveň 70%. Táto dopravná značka patrí k 29 značkám, ktoré boli v prvej časti programu detegované. Priemerná hodnota intenzít všetkých detegovaných značiek je 54.52%. Tým, že len jedna značka nebola detegovaná v procese predspracovania, demonštruje aj priemerná hodnota intenzít (52.70%) všetkých 30 dopravných značiek, ktorá sa výrazne nelíši.
Vzhľadom na to, aby bolo možné určiť, ktorý experiment dosiahol optimálne hodnoty, sa zvolil princíp určenia štatistických hraníc. Pomocou nich vieme určiť, ktorý videozáznam mal najväčší počet detegovaných dopravných značiek pri rozdielnych svetelných podmienkach. V Tab. 1 sú zobrazené štyri prahové hodnoty, pre ktoré sme spravili potrebné merania. Pre 40% úroveň sa podarilo zachytiť 18 vyhovujúcich dopravných značiek, ktorých priemerná hodnota intenzít predstavuje 67.05%. V tejto úrovni sa detegovalo najviac dopravných značiek. Najmenej značiek bolo objavených pre 70% stanovenú prahovú hranicu.
Tab.1 Výsledky spracovania – Sunny
| Prahové hodnoty intenzít | 40% | 50% | 60% | 70% |
|---|---|---|---|---|
| Detegované dopr. značky | 18 | 16 | 14 | 6 |
| Priemerná hodnota intenzít | 67.05% | 69.64% | 72.07% | 74.96% |
Taktiež je nevyhnutné podotknúť, že 15 dopravných značiek dosiahlo hodnoty nižšie ako bola stanovená minimálna klasifikovaná úroveň. Pričom týchto 15 značiek zahŕňa aj dopravnú značku, ktorá vôbec nebola vstupným procesom detegovaná. Zaraďuje sa teda do rozsahu 0-40% prahovej hladiny, keďže nadobúda nulovú hodnotu.
Obr. 9 Intenzity dopravných značiek – Sunny
Na Obr. 9 sú graficky ilustrované hodnoty intenzít všetkých dopravných značiek s farebným odlíšením. Na percentuálne vyjadrenie bol použitý vzorec (1),
 |
(1) |
kde hodnoty oboch porovnaných snímok I1 a I2 boli sčítané a podelené hodnotou 510, ktorá vychádza z rozsahu hodnôt korelačných špičiek <0;255>, ktoré môže každá snímka v procese korelácie nadobudnúť.
3.2. Experiment #2
Druhý experiment je zameraný pre vonkajšie vplyvy zamračeného počasia (CLOUDY). Na Obr. 10 je zosnímaná scéna pod vplyvom týchto svetelných podmienok. Môžeme sledovať, že na snímke sú umiestnené dve značky červenej a bielej farby, pričom pre náš experiment boli použité dopravné značky s červeným, modrým a žltým podkladom kvôli použitiu konkrétnych farebných filtrov v programovom vybavení.

Obr. 10 Dopravná scéna – Cloudy
Celkový počet nájdených dopravných značiek pre tento typ poveternostných podmienok je 26. Štatisticky to predstavuje 60.62%. Pre prahovú úroveň 40% bolo nájdených 22 značiek s priemerom intenzít 62.57%. Všetky štatistické hodnoty sú zobrazené v Tab. 2.
Tab.2 Výsledky spracovania – Cloudy
| Prahové hodnoty intenzít | 40% | 50% | 60% | 70% |
|---|---|---|---|---|
| Detegované dopr. značky | 22 | 18 | 13 | 10 |
| Priemerná hodnota intenzít | 62.57% | 69.91% | 67.99% | 77.71% |
Obr. 11 nám ponúka hodnoty všetkých dopravných značiek pre tento videozáznam. Môžeme taktiež dedukovať, že nedetegované značky sú na pozíciách 12 (Hlavná cesta), 27 (Prikázaný smer jazdy vpravo a vľavo), 28 (Smerová tabuľa) a 30 (Smerová tabuľa).
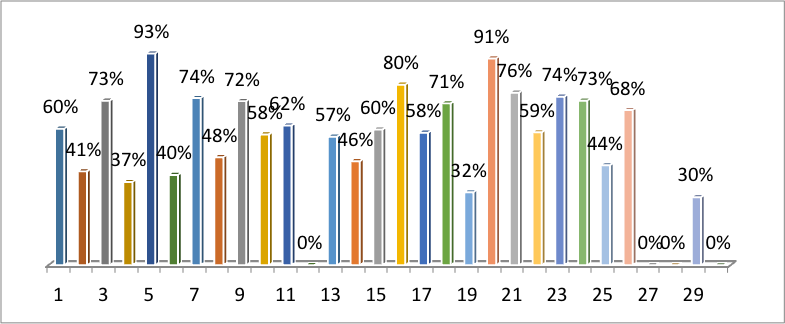
Obr. 11 Intenzity dopravných značiek
Maximálna hodnota intenzity je na pozícii 5 s konkrétnou hodnotou 93.33%, čo predstavuje dopravnú značku s označením Hlavná cesta. Na druhej strane minimálnu hodnotu nám inscenuje pozícia 29 (Priechod pre chodcov) hodnotou intenzity presne 30.00%.
3.3. Experiment #3
Posledný experiment je zameraný pre vonkajšie vplyvy počas zimného obdobia (SNOW). Na Obr. 12 je zosnímaná scéna pod vplyvom týchto svetelných podmienok. Ukážka dopravnej situácie s dopravnou značkou priechodu pre chodcov bola zachytená s tmavým charakterom. Pre zvýraznenie farieb dopravného značenia je počas úvodných nastavení hodnota gama korekcie, jasu a kontrastu nastavená tak, aby došlo k zosvetleniu snímky a umožnilo tak detekciu čo najväčšieho počtu dopravných značiek.

Obr. 12 Dopravná scéna – Snow
Celkový počet nájdených dopravných značiek v tomto experimente bolo 24. Štatisticky to predstavuje 56.83%. Pre prahovú úroveň 40% bolo nájdených 17 značiek, čo je najmenší počet zo všetkých experimentov a s priemerom intenzít 66.19%. Pri hranici 50% bolo nájdených 13 s priemernou hodnotou približnou ako bolo pri predchádzajúcej hranici. Všetky štatistické hodnoty sú zobrazené v Tab. 3.
Tab.3 Výsledky spracovania – Snow
| Prahové hodnoty intenzít | 40% | 50% | 60% | 70% |
|---|---|---|---|---|
| Detegované dopr. značky | 17 | 13 | 12 | 8 |
| Priemerná hodnota intenzít [%] | 66.19% | 66.02% | 70.47% | 75.86% |
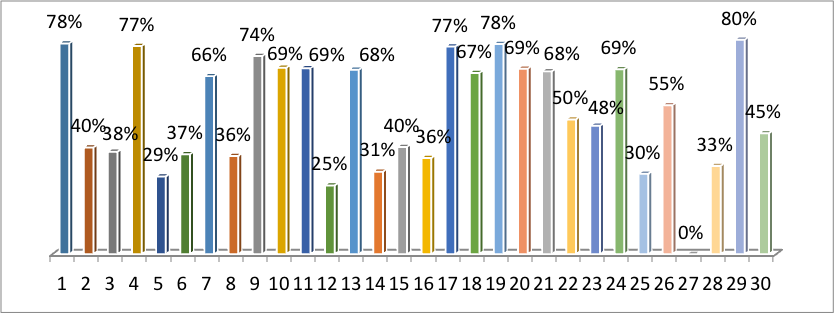
Obr. 13 nám ponúka hodnoty všetkých dopravných značiek pre tento videozáznam. Môžeme taktiež analyzovať, že nedetegované značky sú na pozíciách 4 (Prikázaný smer jazdy priamo a vpravo), 6 (Smerová tabuľa s jedným cieľom), 8 (Čerpacia stanica), 12 (Hlavná cesta), 16 (Hlavná cesta)a 30 (Smerová tabuľa).
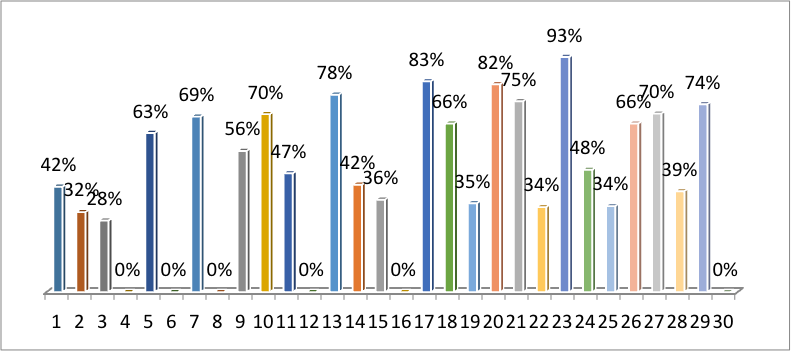
Obr. 13 Intenzity dopravných značiek – Snow
Maximálnu hodnotu nadobúda dopravná značka na pozícii 23, čo predstavuje presne hodnotu intenzity 92.75%. Táto značka (Daj prednosť v jazde) bola zachytená vo veľmi dobrej kvalite, čo korešponduje s hodnotou intenzity. Na druhej strane minimálna hodnota je reprezentovaná 3. pozíciou, ktorá označuje priechod pre chodcov. Jej štatistická hodnota je presne 28.24%, čo nepresahuje ani najnižšiu stanovenú prahovú hodnotu. Vstupná snímka je v tomto prípade výrazne tmavšia, čo zhoršuje jej celkové predspracovanie a následne vykonanú optickú koreláciu s referenčnou značkou z databázy.
Záver
Všetky typy inventarizačných systémov pracujú s rovnakou myšlienkou, ale spôsob, ako spracovávajú údaje, je rôzny. V tejto práci sa pre princíp spracovania a porovnávania použila optická technológia, ktorá dokáže spájať optické a elektronické vlastnosti do jedného. Táto technológia je zakomponovaná do optického zariadenia, ktorý bol v práci použitý pre porovnávaciu časť.
Pre porovnanie počtu detegovaných dopravných značiek boli vybraté tri typy svetelných podmienok, pri ktorých sa zachytával rovnaký úsek cesty. Boli to podmienky počas slnečného počasia (Sunny), počasie ovplyvnené oblačnosťou (Cloudy) a posledný záznam bol zachytený počas zimného obdobia (Snow). Všetky tieto videozáznamy prešli procesom predspracovania vstupnej scény a následne bola vykonaná korelácia, na základe ktorej sme získali mieru podobnosti jednotlivých značiek. Taktiež boli určené štyri prahové úrovne, pri ktorých sme sledovali, koľko dopravných značiek spĺňa túto hranicu a koľko je pod touto hranicou.
V celkových výsledkoch bolo najviac detegovaných dopravných značiek pri videozázname, ktorý bol získaný počas zamračeného počasia. Nasledoval záznam počas slnečného počasia a na poslednom mieste bol záznam počas zimného obdobia. Výrazný vplyv na detekciu majú práve svetelné podmienky, ktorých intenzita dopadajúca na dopravnú značku môže ovplyvniť jej detekciu. Ideálnu prahovú hranicu sme určili 50%. Hoci viac detegovaných značiek bolo pri hranici 40 %, kvalita snímok nebola postačujúca. Ďalším výrazným vplyvom je nastavenie autokamery a rýchlosť motorového vozidla. Tieto faktory taktiež výraznou mierou ovplyvňujú výstupné hodnoty a tým eliminujú negatívne vplyvy.
Zoznam použitej literatúry
- Dopravné značky a dopravné zariadenia [online]. Dostupné na internete:
https://ep.edu.sk/9999/Sylaby1/Dopravn%C3%A9%20zna%C4%8Dky%20a%20dopravn%C3%A9%20zariadenia.doc - Cambridge correlator [online]. [cit. 2015-06-01]. Dostupné na internete:
http://www.cambridgecorrelators.com/optical.html - J. Turán, Ľ. Ovseník, T. Harasthy, “Traffic Sign Recognition System based on Cambridge Correlator Image Comparator” – 2012.In: Carpathian Journal of Electronic and Computer Engineering. Vol. 5, no. 1 (2012), p. 127-132. – ISSN 1844 – 9689
- T. Harasthy, J. Turán, Ľ. Ovseník and K. Fazekas, “Optical correlator based Traffic Signs Recognition”, International Conference on System, Signal and Image Processing, Vienna, Austria, ISBN 978-3-200-02328-4, 2012.
- D. Solus, Ľ. Ovseník, J. Turán,, “Inventory System of Vertical Traffic Signs” – 2015. 25th Conference Radioelektronika 2015, April 21-22, Pardubice, Czech Republic.
- S. Toth, E. Krsak, “Traffic Sign Recognition and Localization for Databases of Traffic Signs,” Acta Electrotechnica et Informatica, vol. 11, no. 4 (2011), pp. 31-35.
- A. Broggi, P. Cerri, P. Medici, P. P. Porta, G. Ghisio, “Real Time Road Signs Recognition,” Proceedings of the IEEE Intelligent Vehicles Symposium, Istanbul, Turkey, June 13-15, 2007.
Spoluautormi článku sú doc. Ing. Ľuboš Ovseník, PhD. a Ing. Veronika Kravčáková, Katedra elektroniky a multimediálnych telekomunikácií, FEI TUKE, Slovenská republika

