Fuel consumption optimalization in parallel hybrid vehicle
07. September, 2009, Autor článku: Matej Juraj, Elektrotechnika, Študentské práce
Ročník 2, číslo 9  Pridať príspevok
Pridať príspevok
 Hybrid drivetrains for vehicles or trucks combine multiple power sources in order to increase the driving functions. Analysis of an optimal energy management and control system for a parallel hybrid electric truck are presents in this paper. The function can enhance the fuel consumption, emissions, comfort, driving performance and safety. In this paper the focuses is on fuel consumption reduction and maximize powertrain efficiency. The optimal energy management strategy is determined by using fuzzy logic in the simulations. This paper deals about optimization of energy control and power flow in the hybrid electric truck with parallel hybrid powertrain system.
Hybrid drivetrains for vehicles or trucks combine multiple power sources in order to increase the driving functions. Analysis of an optimal energy management and control system for a parallel hybrid electric truck are presents in this paper. The function can enhance the fuel consumption, emissions, comfort, driving performance and safety. In this paper the focuses is on fuel consumption reduction and maximize powertrain efficiency. The optimal energy management strategy is determined by using fuzzy logic in the simulations. This paper deals about optimization of energy control and power flow in the hybrid electric truck with parallel hybrid powertrain system.
Introduction
In these days is very important looking for alternative power sources not only for automotive industry. If word-wide reserves of oil are to more or less years, the fact still is that oil is exhaustible energy source and so much the better when we early find a new one. First step how we can walk out from engine drivetrain vehicles to the vehicles with electric drivetrain is for example vehicle with hybrid electric drivetrain. Hybrid electric vehicles combine advantages and displace disadvantages of both. For example trailing throttle and time which we need to charge the batteries. The electric motor also has a non emission operation and an ideal running of torque because motor has in long volume constant power and torque appertain to this power has an optimal running to drive the vehicle. So, the hybrid electric vehicles are not the final production of automotive industry but only the interstage product destined to the electric vehicle.
This paper is interesting to an optimal control strategy of parallel hybrid electric powertrain of truck. The purpose of this control strategy is engine torque usage only around the peak efficiency torque line in which engine works with actual minimal brake specific fuel consumption.
Fuzzy logic control
In the control of a parallel hybrid electric vehicle, one of the primary goals is to set the IC engine operation in it’s peak efficiency region. This improves the overall efficiency of the powertrain. This is best achieved by a CVT. But in the absence of one, the engine operation must be set according to the road load and the battery state of charge [5]. Two strategies are provided that can be used to achieve this goal:
- One is the fuel-use strategy, which limits the instantaneous fuel consumption as calculated from the fuel-use map
- Another strategy is the Efficiency strategy, which tries to operate the engine in it’s peak efficiency regions
Details of these two strategies are given below in figures. Due to the highly nonlinear, time varying nature of the plant, the control strategy will be implemented with the use of a fuzzy logic controller. The fuzzy logic control will use two inputs: the battery pack SOC and the desired engine torque. Based on the above inputs, the engine operating point is set. Along the simulation, in the reverse loop, the desired electric motor torque is calculated from the following equation:
 |
(1) |
where TLOAD is the load required from the drive cycle due to acceleration, drag, road grade, etc., and TICE_Set is the desired output torque of the engine. The controller outputs the change of the throttle command. [5]
Optimal control strategy of hybrid electric truck
Fuzzy logic strategy is a strategy that limits the instantaneous fuel use of the engine. This makes sure that the fuel use (g/s) does not increase beyond a particular value. Note that this strategy is not based on the efficiency of the engine. It primarily limits the fuel use to a particular value. Each engine has an associated fuel use map (in g/s). This map is used to determine the allowable range of speed and torque from the engine [5].
The following graph depicts the engine operating points for a 184 kW engine, where the fuel use has been limited to 1 g/s.
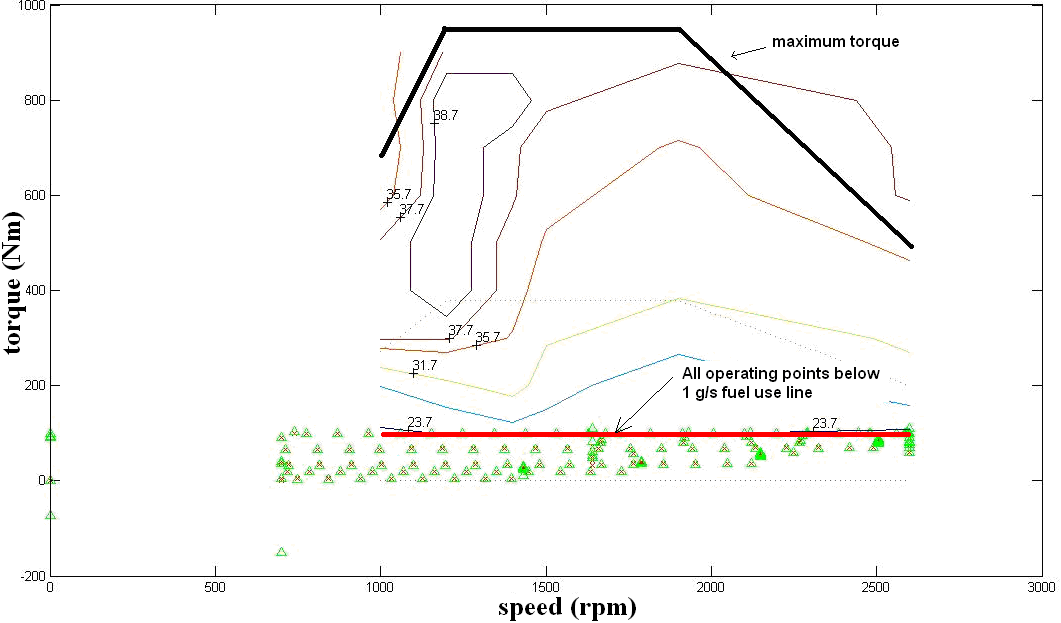
Fig. 1 Operating engine points in Fuel mode strategy
In the efficiency strategy is used to run the engine about it’s peak efficiency region. In this strategy, the operating points of the engine are set near the torque region, where efficiency is the maximum for that particular engine speed. In this strategy, speed is not a variable involved, since it is designed for a discrete gear ratio system (not a CVT) [5].
Since an electric motor is available to load-level, the HEV can use its e-machine to force the engine to operate in a region that consumes less fuel, while maintaining the state of charge (SOC) of the battery pack over the majority of the drive cycle. This is achieved by using the electric motor to compensate for the dearth in Torque required to meet the road load. Load leveling has to be done, to meet the total driveline torque request, and to prevent unecessary charges or discharges of the battery pack [5].
The following graph depicts the Engine operating points for a 184 kW Engine, where the operating points are located near the peak efficiency region.
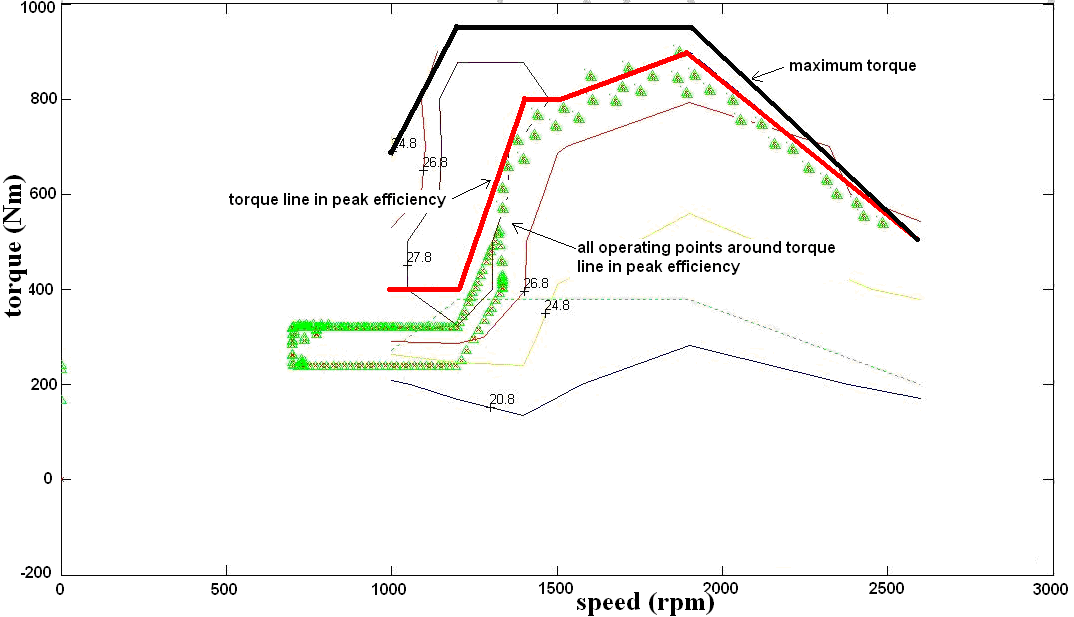
Fig. 2 Operating engine points in Efficiency mode strategy
The efficiency mode has it’s advantages and disadvantages. The advantage is that, one can always run the engine near peak efficiency. The disadvantage is that most peak efficiency points are near regions of high torque. Thus, during most cases, the engine gives out more torque than what is needed for the driving cycle. This results in the following:
- Higher fuel consumption
- Heavy regeneration by the electric motor due to load-leveling, thus increasing SOC
To avoid this, this strategy is to be used usually only with undersized engines. For undersized engines, the peak torque regions may correspond to the average torque requirements of a driving cycle. The following explains the block diagram used in the Fuzzy Logic control strategy.

Fig. 3 Fuzzy control block [5]
The above is the main block. It takes in the inputs, scales the inputs, runs the fuzzy logic algorithm, and gives out the scaled outputs.
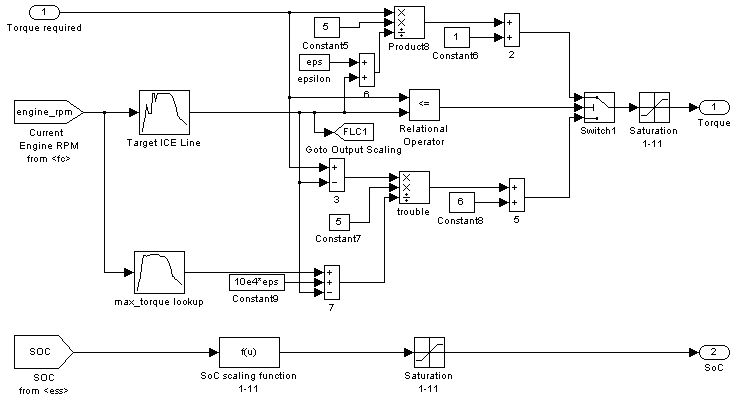
Fig. 4 Input scaling [5]
In this block, inputs to the Fuzzy Logic controller are computed. The current torque demand on the engine and the SOC are input as scaled variables to the fuzzy controller. Both inputs are scaled from 1 to 11. For SOC, a value of SOClow would correspond to 1 and a value of SOChigh would correspond to 11, linearly interpolating between them. For the engine torque, any torque demand less than the target engine torque would scale from 1 to 6. Any torque demand greater than the target engine torque would scale from 6 to 11.The target engine torque is the x g/s fuel use line, (fuel use mode), or the peak efficiency line (efficiency mode) [5].

Fig. 5 Fuzzy logic code [5]

Fig. 6 Output scaling [5]
This block scales the outputs of the controller to match the size of the components. The scaling affects the way the control signal is fed into the actuators (in this case, the engine). The scaling is done based on the membership functions of the Fuzzy Control block. Here: DELTA ALPHA is scaled from 1 to 11, 1 representing zero torque, 6 representing target Torque and 11 representing max engine torque [5].
Simulation results
Next simulation results are valid for parallel hybrid drivetrain vehicle, which schematic representation is in the figure 7. The engine and motor are parallel connected in the vehicle’s powertrain. Power which vehicle needs to drive can be delivered by engine or by motor or both. Next simulations are compute for three schedule of vehicle drive. The first situation is so called hybrid schedule in which the engine and motor are controlled by fuzzy logic control. Fuzzy logic control keeps the engine operating points near the torque in peak efficiency of engine.

Fig. 7 Parallel hybrid drivetrain configuration
In the second simulation results are simulations computing for emergency schedule in which engine drives the vehicle without motor or generator. This situation can become in defect of the electrical part of powertrain for example defect of batteries or if batteries state of charge is low then lower limit SOCmin.
Last simulations represents drive the vehicle with the full throttle on the maximum speed. This situation can became for example on the highway drive. All simulation results are valid for the driving cycle described on the figure 8.

Fig. 8 Driving cycle test
The engine operating points in hybrid schedule that is controlled by fuzzy logic control are representing by next figure 9.

Fig. 9 Engine operating points in hybrid schedule
Running of the engine efficiency by the driving cycle represent figure10. This figure shows values of engine efficiency on the driving cycle. Figure 10 shows on all area of driving cycle are values of engine efficiency in higher values mostly from 30 to 40%.

Fig. 10 Running of engine efficiency in hybrid schedule
The motor working area isn’t very interesting for us because motor efficiency is relatively high in the all motor working area. The motor working area needn’t be controlled by fuzzy logic or optimization of motor we don’t needed because motor efficiency is mostly higher then engine efficiency.
On the figure 11 is represent SOC running during the driving cycle. We can see that batteries are continually charging during the driving cycle. It is due to periodic breaking and loads the engine by generator besides load of the driving cycle. The engine must often deliver the power to generator and to driving wheels together during this driving cycle.

Fig. 11 Running of SOC in hybrid schedule
On the figure 12 we can see the engine operating points on the emergency schedule of the vehicle powertrain. The power to driving wheels is delivered only by engine. Engine load is equal to load from driving cycle. We can see that the engine operating points are diffuse on the large volume. In this situation the engine torque is not controlled by fuzzy logic control. Behavior of the vehicles powertrain is equal to non hybrid vehicle.

Fig. 12 Engine operating points in emergency schedule

Fig. 13 Running of engine efficiency in emergency schedule
Figure 13 represent engine efficiency during the driving cycle in emergency schedule. Torque of engine is not optimized by fuzzy logic control or load control of motor/generator. The values of engine efficiency in this schedule are lower, as we can see in the figure 13. This is situation as the same time than the non hybrid powertrain vehicle.
Conclusion
Simulation results and the control energy strategy in the hybrid powertrain are designed in the Advisor 2004. Vehicle in the simulations has following parameters: mass of the vehicle = 16500kg, coefficient of rolling force = 0,012, coefficient of drag, cx = 1,06, maximum engine power = 184kW/2500rpm, maximum engine torque = 950Nm/1300-1700rpm, maximum motor power = 150kW/1400-2600rpm, maximum motor torque = 1100Nm/0-1400rpm. In term of powertrain efficiency the hybrid drive is very interesting. The engine is weakest ring of all the powertrain. Using higher efficiency of engine or produce lower emissions or decrease of fuel consumption be able to achieve by fuzzy logic control or by dynamic programming. In this paper is described optimal energy control strategy in parallel hybrid truck by fuzzy logic control. The all engine operating points are around the torque line in peak efficiency of engine by using the fuzzy control of motor/generator torque.
References
- Lin, Ch., Kang, J., Grizzle, J, Peng, H.:: Energy managment strategy for a paralel hybrid electric truck, Proceedings of the Amarican Control Conference, Arlington, VA June 25-27, 2001
- Hofman, T., Druten, R.: Energy Analysis of Hybrid Vehicle Powertrains, Technische Universiteit Eindhoven, Dept. of Mechanical Engineering, Control Systems Technology, NL 5600 MB Eindhoven, The Netherlands
- Wu, B., Lin, Ch., Filipi, Z., Peng, H., Assanis, D.: Optimization of Power Management Strategies for a Hydraulic Hybrid Medium Truck, Proceedings of the 2002 Advanced Vehicle Control Conference, Hiroshima, Japan, September 2002
- Lin, Ch., Peng, H.,Grizzle, J.: power management strategie for a paralel hybrid electric truck, Proceedings of the 2002 Mediterranean Control Conference, Lisbon, Portugal, July 2002.
- AVL Advisor 2004, User’s guide, April 2004

